
As unmanned vessels continue to develop towards long voyages, full autonomy, and long-distance operations, the traditional plug-and-chug charging method, which requires manual connection and on-site operation, has become unable to meet the actual needs of all-weather, unmanned, and large-scale operations. Wireless charging is becoming the standard power replenishment solution for the new generation of intelligent unmanned vessels. It not only realizes non-contact power supply but also upgrades unmanned vessels from “returning after a single mission” to “autonomous charging, continuous operation”, truly possessing the ability to work continuously in all areas. Unmanned vessel wireless charging essentially involves three core systems: non-contact energy transmission, autonomous precise docking, and adaptive water surface environment. In complex water conditions such as waves, humidity, salt fog, and corrosion, it safely, stably, and efficiently completes power transmission. The entire system not only includes mature energy transmission technology but also undergoes a large amount of engineering optimization for water-related scenarios. Below, from the four dimensions of implementation path, core technology, scene form, and future trend, we will comprehensively interpret the complete logic of unmanned vessel wireless charging.
The overall implementation path of wireless charging for unmanned ships is a fully autonomous closed-loop process from perception – navigation – docking – transmission – management – disembarkation, without any manual intervention. When the battery level of the unmanned ship drops below the preset threshold, the onboard control system will automatically trigger a low-battery warning. Based on the current operating area, task priority, and charging station location, it will autonomously plan the optimal return route. It will complete coarse positioning by relying on dual-mode positioning of Beidou/GPS. After reaching the vicinity of the charging platform, it will perform centimeter-level precise alignment through visual recognition, laser radar, ultrasonic sensors, or underwater acoustic positioning technology to ensure that the ship body maintains a stable relative position with the charging transmitting end. Under the influence of wave disturbances, the system will use dynamic attitude compensation, flexible docking structure, or magnetic positioning device to counteract the offset caused by the ship’s roll and pitch, completing a reliable docking. After the wireless charging system starts the energy transmission, it will deliver the electrical energy to the on-board receiving end in a non-contact manner. After rectification, voltage stabilization, and matching with the BMS battery management system, it will safely charge the lithium battery pack. During the charging process, it will monitor data such as voltage, current, temperature, and transmission efficiency in real time. If any abnormalities occur, it will immediately activate protection. Once fully charged, the system will automatically shut off power and unlock the unmanned ship, allowing it to autonomously leave the charging platform and resume its operational tasks. The entire process is fully automated, achieving 7×24-hour uninterrupted operation.
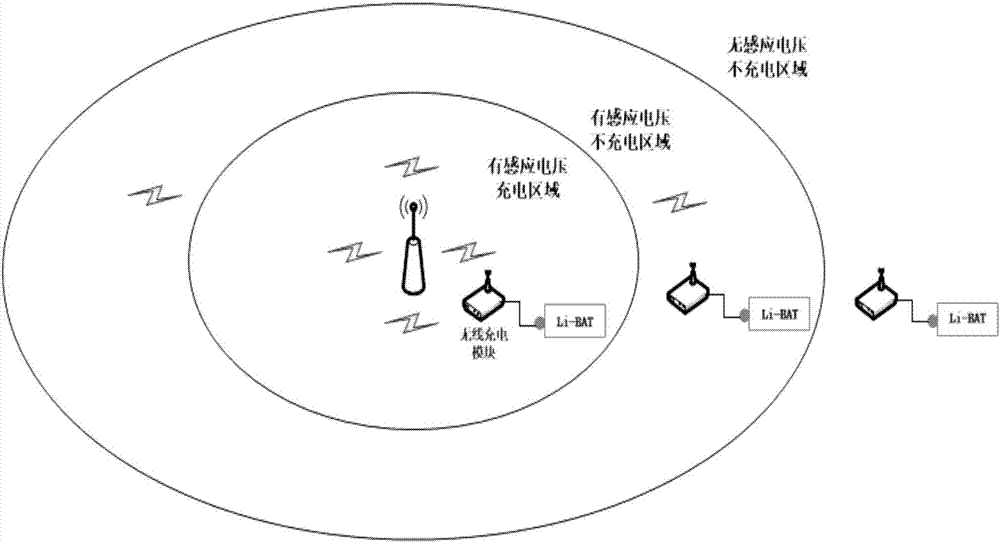
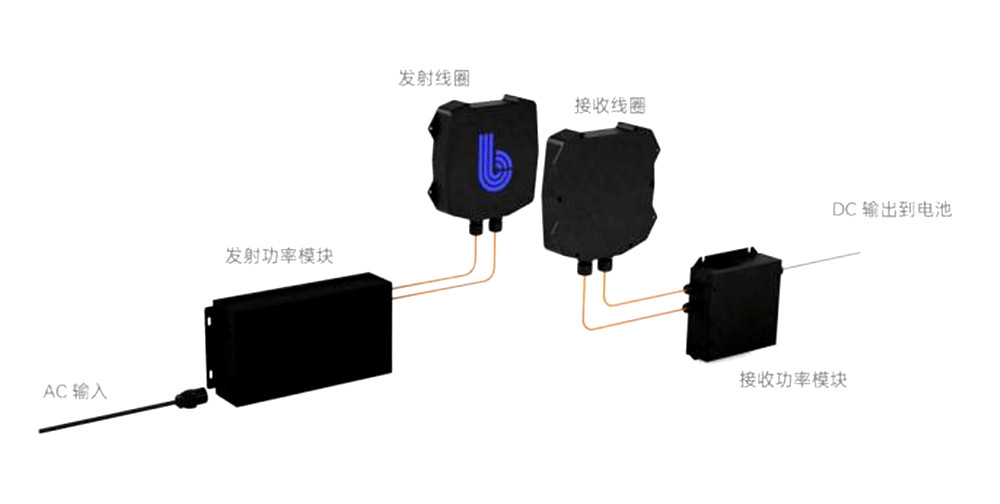
At present, the most mature and widely applied key technologies for unmanned ship wireless charging are mainly electromagnetic induction wireless charging and magnetic coupling resonant wireless charging. Both have their own advantages and together support the practical application in water areas. Electromagnetic induction wireless charging is currently the most industrialized solution, with a principle similar to that of wireless charging in consumer electronics. It generates high-frequency alternating magnetic fields through the transmitting coil on the shore or floating platform, and the receiving coil on the bottom of the ship senses the magnetic field to generate current, which is then converted into power to charge the battery. It has the characteristics of high efficiency, wide power coverage range, strong stability, and mature safety. The efficiency is generally above 85%, which can meet the rapid replenishment needs of small-sized unmanned ships. The disadvantage is that it requires higher alignment accuracy of the coils, and is more suitable for relatively stable inland rivers, lakes, and docks. The magnetic coupling resonant wireless charging achieves energy transmission by resonance between the transmitting and receiving ends at the same frequency. It has lower alignment accuracy requirements and stronger resistance to wave shaking, allowing for larger gaps and offsets. It is particularly suitable for complex sea conditions and strong wind waves. Although the overall efficiency is slightly lower than the induction type, it has stronger adaptability in complex waters and is more efficient than the induction scheme as technology progresses, becoming an important technical route for large and ocean-going unmanned ships. At the same time, to adapt to the water environment, both technologies adopt fully sealed waterproof, salt spray resistant, and corrosion-resistant designs, with a protection level of IP68 or above, and can work stably in humid, spray, and short-term immersion environments.

Apart from the energy transmission itself, the autonomous docking and environmental adaptive technologies are the key factors for the successful implementation of wireless charging for unmanned ships, and they are also the core difficulties that distinguish it from terrestrial wireless charging. The positions of terrestrial equipment are fixed, while unmanned ships always experience vibrations, drifts, and fluctuations on the water surface. Therefore, high-precision positioning and closed-loop attitude control must be relied upon. Some unmanned ships are also equipped with mechanical guide grooves, floating charging platforms, magnetic-assisted positioning structures, etc., to reduce the impact of waves on the success rate of docking. During the energy transmission process, the system also has multiple safety mechanisms such as real-time power regulation, foreign object detection, over-temperature protection, over-current and over-voltage protection, and leakage protection. Before charging, identity recognition and communication handshake are carried out to avoid false triggering or energy leakage, ensuring that the onboard radar, communication modules, underwater acoustic equipment, sensors, etc. do not interfere with normal operation in complex maritime environments. At the same time, the onboard BMS battery management system and the wireless charging system are deeply linked. Based on the state of battery cells, temperature, and current characteristics, the charging power is intelligently adjusted to achieve various modes such as fast charging, slow charging, and maintenance charging, extending the battery life and ensuring the safety and stability of the power system.
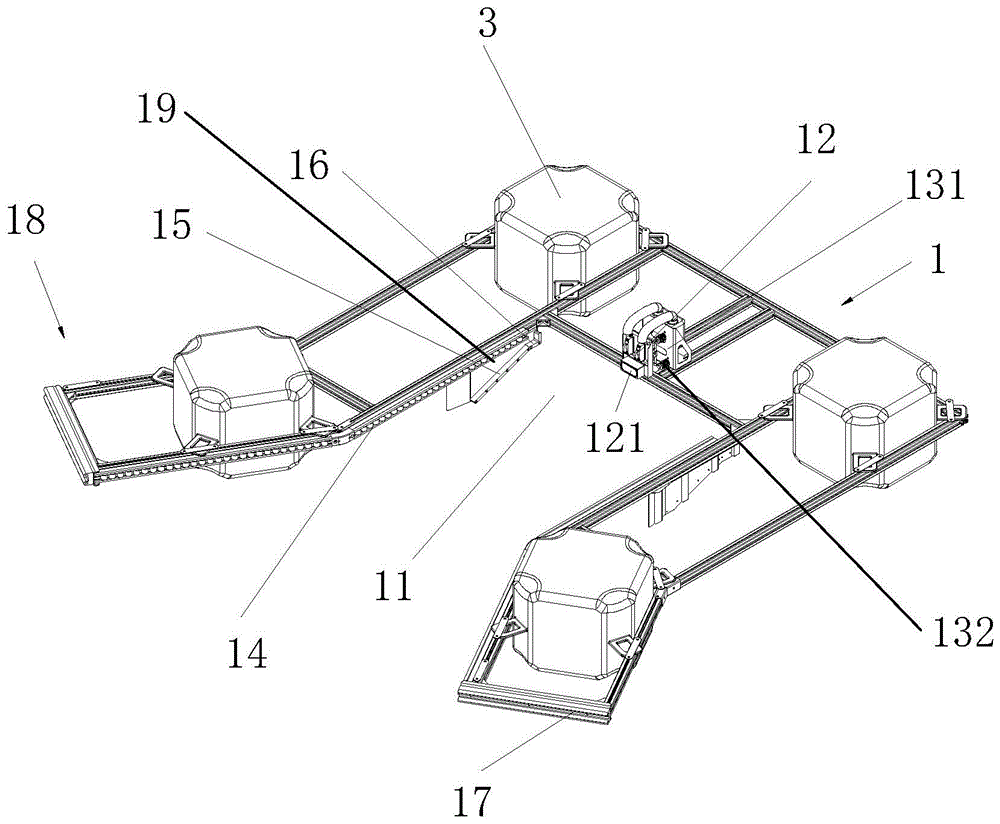
From the perspective of actual deployment forms, wireless charging for unmanned vessels can be mainly divided into three types: shore-based fixed charging platforms, floating platform charging stations, and side-mounted charging positions on the dock. The shore-based fixed type is suitable for unmanned vessels conducting inspections in fixed scenarios such as inland rivers, lakes, and reservoirs, with low construction costs and high stability; the floating platform charging station floats with the water level and is not affected by water level fluctuations, making it suitable for scenarios such as rivers, near-shore areas, and large ports, and can be flexibly deployed according to the water environment; the side-mounted type is installed on the edge of the dock and does not occupy the waterway, making connection convenient, and is suitable for use by security, patrol, and maritime law enforcement unmanned vessels. These three forms all support modular deployment and can be used individually or arranged in a network layout to achieve multi-point energy replenishment within a large water area and support multiple vessels for rotation charging, improving the efficiency of the formation operation.
With the deep application of unmanned vessels in fields such as hydrological monitoring, water security, emergency rescue, waterway mapping, and marine engineering, wireless charging is no longer an additional function but a basic capability that supports the autonomous, intelligent, and regular operation of unmanned vessels. It completely solves the problems of low efficiency of manual charging, inability to operate in adverse weather conditions, and inability to be on duty at night, allowing unmanned vessels to truly achieve full autonomous operation.
In the future, as more efficient, higher power, and stronger wave resistance wireless charging technologies mature, and when combined with photovoltaic floating platforms, energy storage systems, and intelligent scheduling platforms, unmanned vessels will form a complete ecosystem of “autonomous operation – autonomous return – autonomous charging – autonomous re-ascension”, significantly improving their endurance, operational radius, and usage economy, and promoting unmanned vessels to move from single-point equipment to formation-based, networked, and all-domain operations, providing solid energy support for the development of smart water conservancy, smart maritime affairs, and intelligent marine equipment.